Probabilistic roadmap path planning



Path traversal of robotic arm through 3D space by traversing between know safe states.
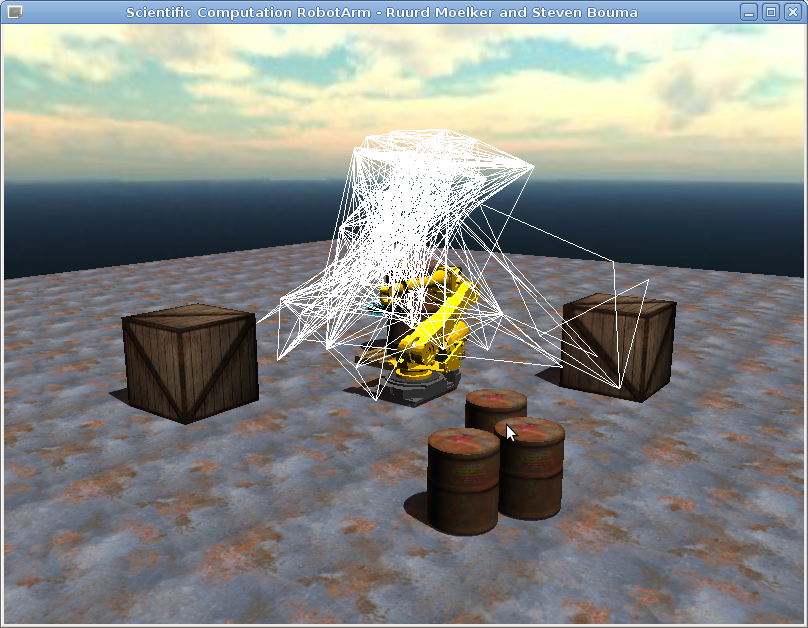
This robotic arm can automatically navigate through space without colliding with world object. This is done by creating a probabilistic roadmap: a graph with known good joint possitions and links between them. The graph is created by trying many different joint states and calculating whether this is a collision free state. Between nearby good states a interpolated path is attempted and is added as a valid transition to the graph if no collisions occur.
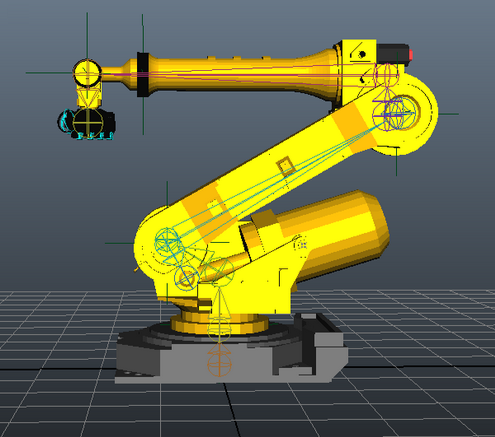
The arm itself is a 3D mesh with custom rigging (skeleton). Calculating end effector position from joint rotation and the inverse is done using linear algebra.
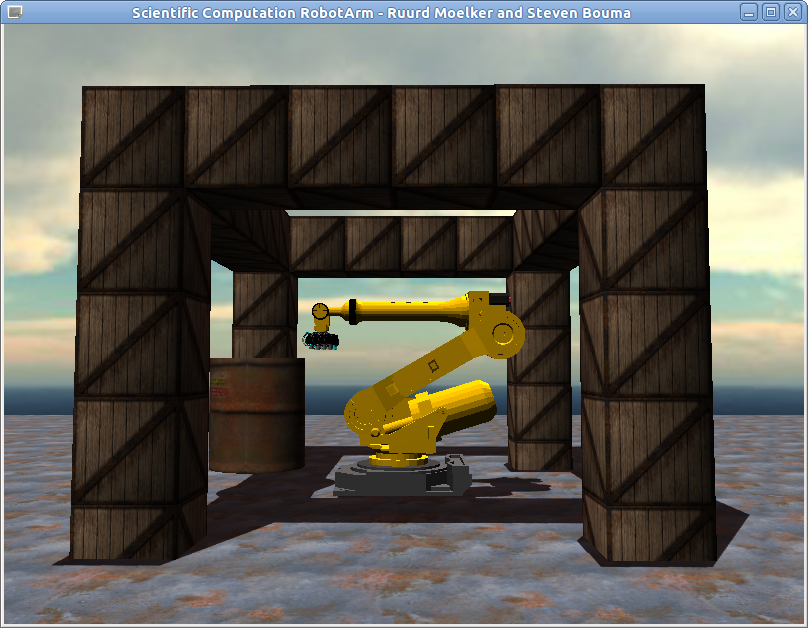
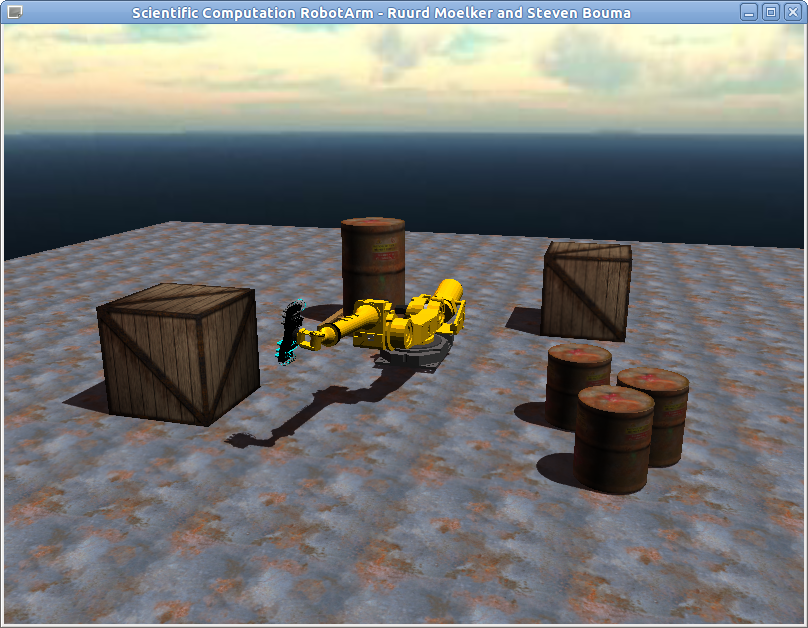
The world is rendered using the Ogre library. Custom geometry is used in conjunction with the Bullet Physics library to create world interaction.
Video of path planning and actual movement. Video hasn't been post processed, so it has no captions and it's a bit on the sluggish side. Jump to 33 seconds to see some action.